圖|研之有物
首先介紹淺田圭一(Keiichi Asada)副研究員,他是事件視界望遠鏡計畫的成員,2009 年延攬來臺灣中研院天文所,從事次毫米波段的 VLBI 研究。
淺田圭一對於 EHT 陣列的格陵蘭望遠鏡(GLT)貢獻良多,完整參與了 GLT 望遠鏡的選址與建造,目前他在計畫中負責管理黑洞觀測。此外,淺田圭一也是人馬座 A 星成像團隊的一員,因此對於影像處理的細節相當瞭解,我們將透過訪問,逐漸揭開銀河系中心黑洞照片背後的秘密。

圖|ESO/José Francisco Salgado, EHT Collaboration
為何銀河系黑洞影像比 M87 慢了三年完成?
早在 2017 年,事件視界望遠鏡就同時完成 M87 和人馬座 A 星兩個黑洞的觀測。為何 M87 黑洞影像在 2019 年就公布,然而人馬座 A 星卻要多等三年呢?
淺田圭一說,研究團隊在 2018 年取得數據的時候,很快就發現 M87 的數據處理容易得多。人馬座 A 星的成像之所以困難,其中有個關鍵因素,是它的周圍結構隨著時間變化非常迅速。
電波干涉儀觀測的原理,是利用望遠鏡之間兩兩一組構成的「基線(baseline)」,測量訊號抵達的時間差,來建構出天體的長相。觀測的時候,每條基線可填入一個資料點。由於地球會自轉,隨著時間的推移,望遠鏡以不同角度接收天體訊號,資料點也愈來愈多,就像是相機長曝光一樣,可以填入愈來愈多的資訊,提高影像品質。
淺田圭一解釋,長曝光的時候目標不應該移動;如果曝光過程中,觀測目標變化很大,就會很難成像,而人馬座 A 星就是這種情況。
圖|研之有物
五年的時間,科學家在做什麼?
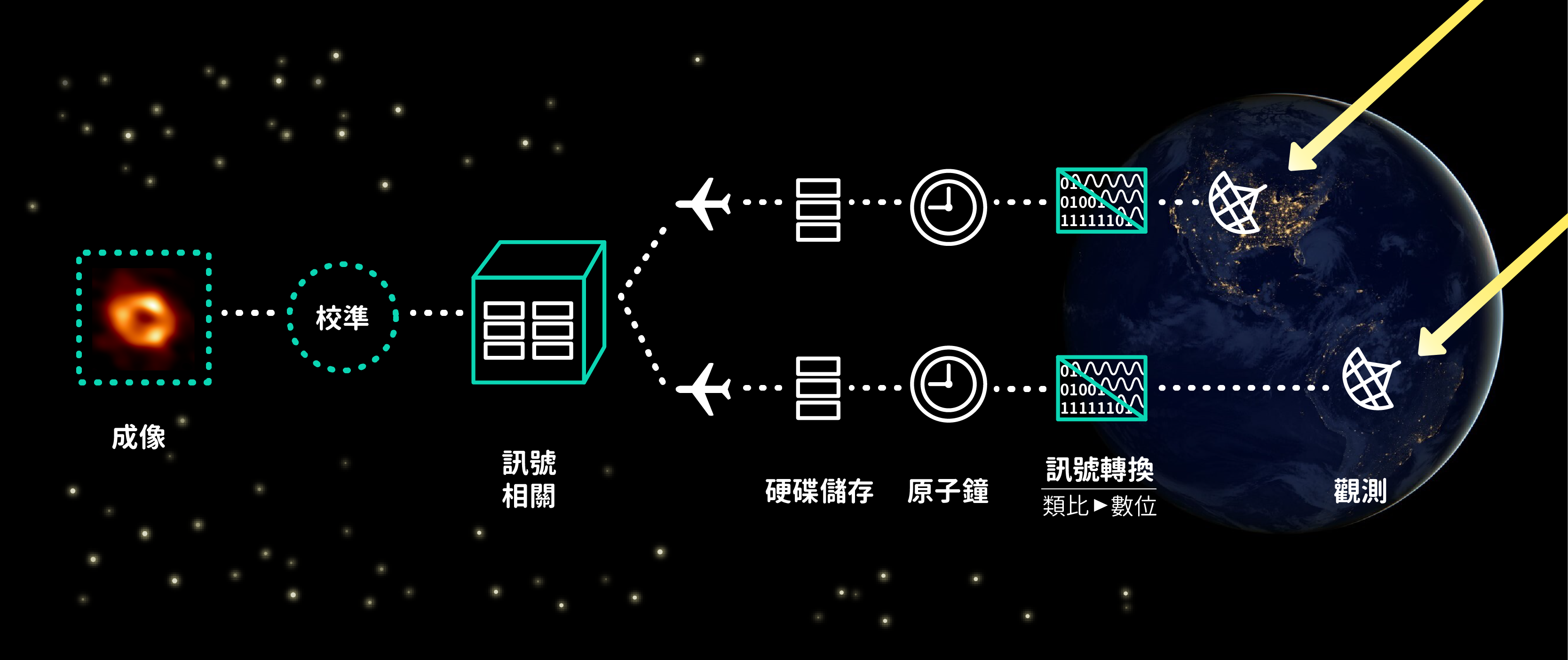
這張黑洞影像的產生耗費了五年,是個浩大的工程。淺田圭一說明,從觀測到產出這張照片,共歷經四個階段的主要任務:觀測(observation)、訊號相關(correlation)、校準(calibration)、成像(imaging)。
圖|研之有物(資料來源|淺田圭一)
觀測(observation)
2017 年,八座望遠鏡共同完成了人馬座 A 星的觀測,而中研院參與了其中三座望遠鏡的建造與營運。
觀測的時候,望遠鏡接收宇宙中傳來的電磁波,轉換為數位訊號(00、01、10、11),記錄在硬碟中。由於事件視界望遠鏡的各個測站距離遙遠,必須先分別將數據儲存下來,用飛機運送到美國麻省理工學院(MIT)和德國馬克斯·普朗克研究所(Max Planck Institutes)。這兩個機構擁有超級電腦,可進行下一步的運算。
為何要用飛機傳送數據呢?淺田圭一開玩笑說:「當然也可以用船!」真正的原因是黑洞的觀測資料非常龐大,每座望遠鏡每秒可生成 4 GB 的資料,一次觀測的資料總量高達 5 PB。加上有些測站地理位置偏遠,網路傳輸非常不便。例如其中一個測站是南極望遠鏡,只有非常慢的衛星網路,於是這麼龐大的資料只能靠飛機實體傳輸。

圖|淺田圭一
訊號相關(correlation)
研究機構收到飛機運來的硬碟之後,利用超級電腦進行「訊號相關」的步驟。電波干涉需要計算多組望遠鏡之間接收訊號的時間差,因而需把來自各地的數據關聯在一起。
這個步驟在 2018 年完成,大約花了一年時間。淺田圭一說,研究團隊不希望有任何錯誤,所以每個步驟都很仔細檢查,不斷發現問題,又回去修正,因此耗費很多時間。
校準(calibration)、成像(imaging)
完成訊號相關之後,還需要校準,將原始數據轉換為能量的物理單位。研究團隊使用兩種不同的指令流程來校準(註1),確認結果一致。
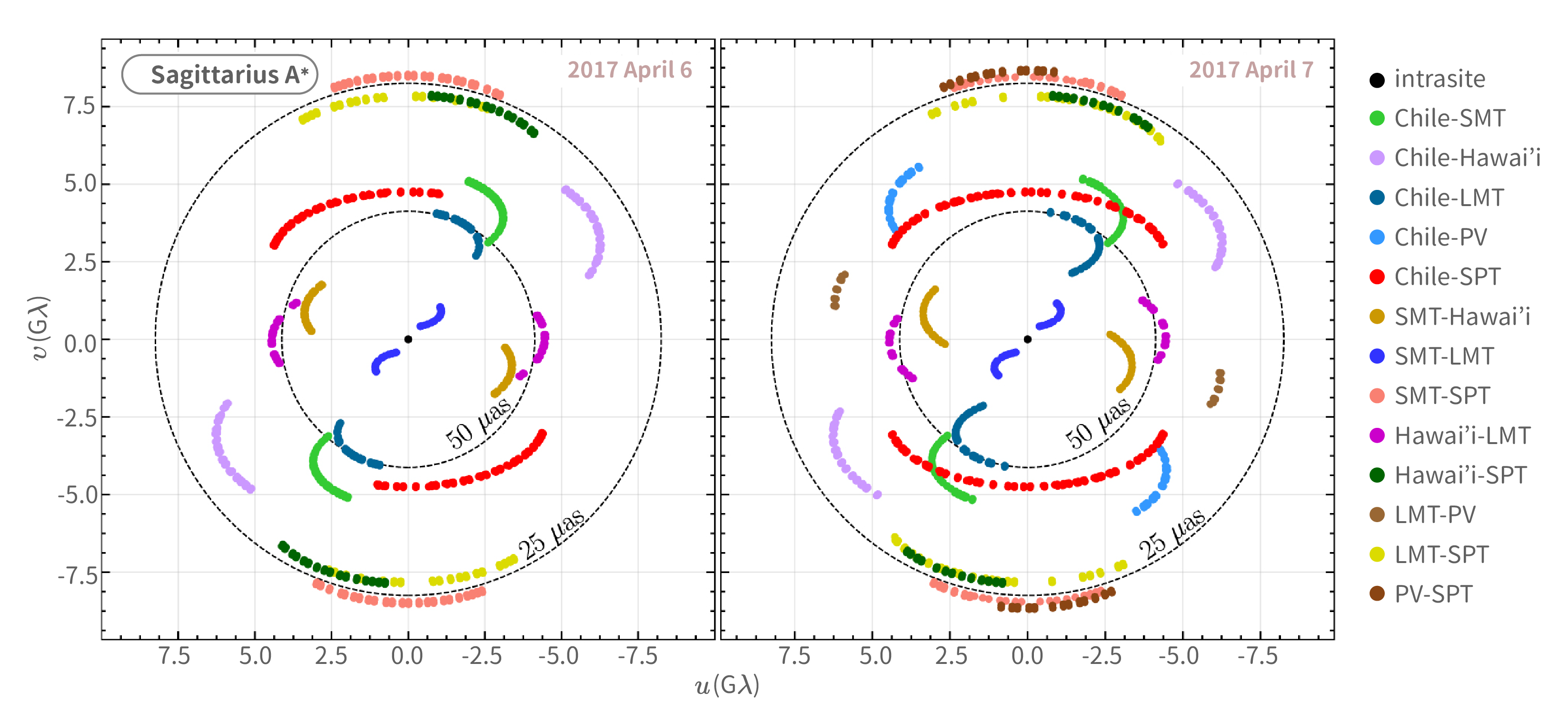
電波干涉儀所測得的數據,並不是直接的「照片」,而是影像經由傅立葉轉換後的結果。下圖稱為 uv 平面(uv plane),用來表達電波天文影像經傅立葉轉換後的空間。
若要直接解出影像,電波觀測的數據需要完全填滿 uv 平面,但是現實中無法做到,只能盡可能取得 uv 平面上的資訊,進而根據既有資料,運用模擬來還原影像。總之,成像是個需要技巧的艱難任務。
圖|事件視界望遠鏡合作團隊
重建黑洞影像是艱難任務
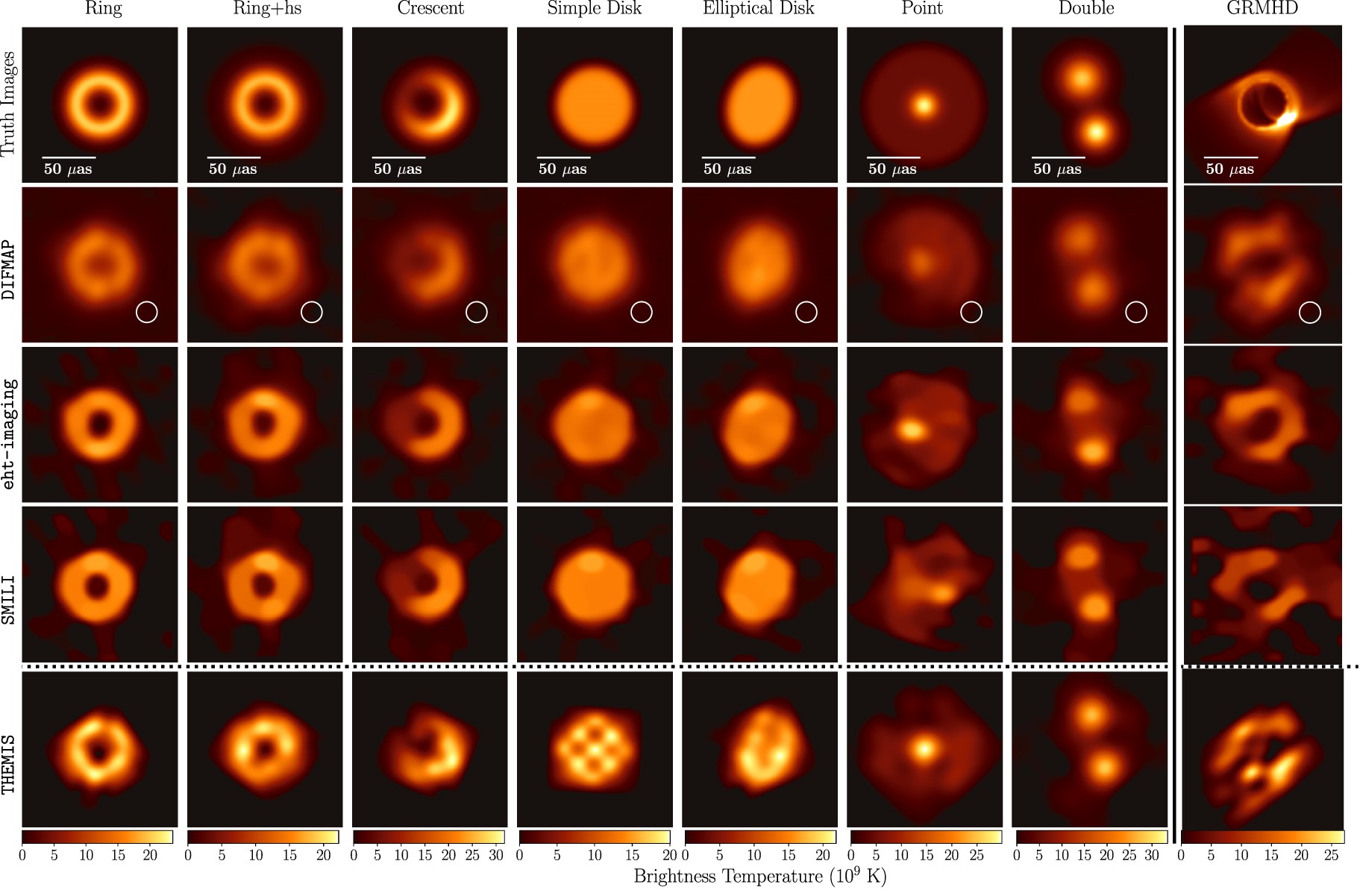
淺田圭一說明,重建影像的方法很多,並且有眾多參數可調整。以 VLBI 觀測黑洞,uv 平面的數據肯定無法收滿,故一開始的觀測數據可產生非常多種影像,其中有些是環狀,有些是點狀。面對這麼多種可能性,科學家如何理出頭緒?
成像工作的重點,在於有技巧的「逆推」。為了找出 uv 數據和黑洞影像的相關性,要先「訓練」一個優秀的影像重建模型。訓練模型要先找出優良的參數,使得影像和數據結果最吻合,尋找優良參數需要依靠電腦模擬,從假設的幾何結構產生假想的數據。
在分析真實數據之前,研究團隊先拿電腦生成的假想數據來「訓練」重建影像的程式。這個「訓練」過程會嘗試非常多的參數組合,並檢驗程式生成的影像是否符合原先假設的幾何結構,藉此挑選出一些優良的參數組合。
找出優良的參數之後,再將這些參數套用在真實觀測數據上,開始重建真實的黑洞影像。
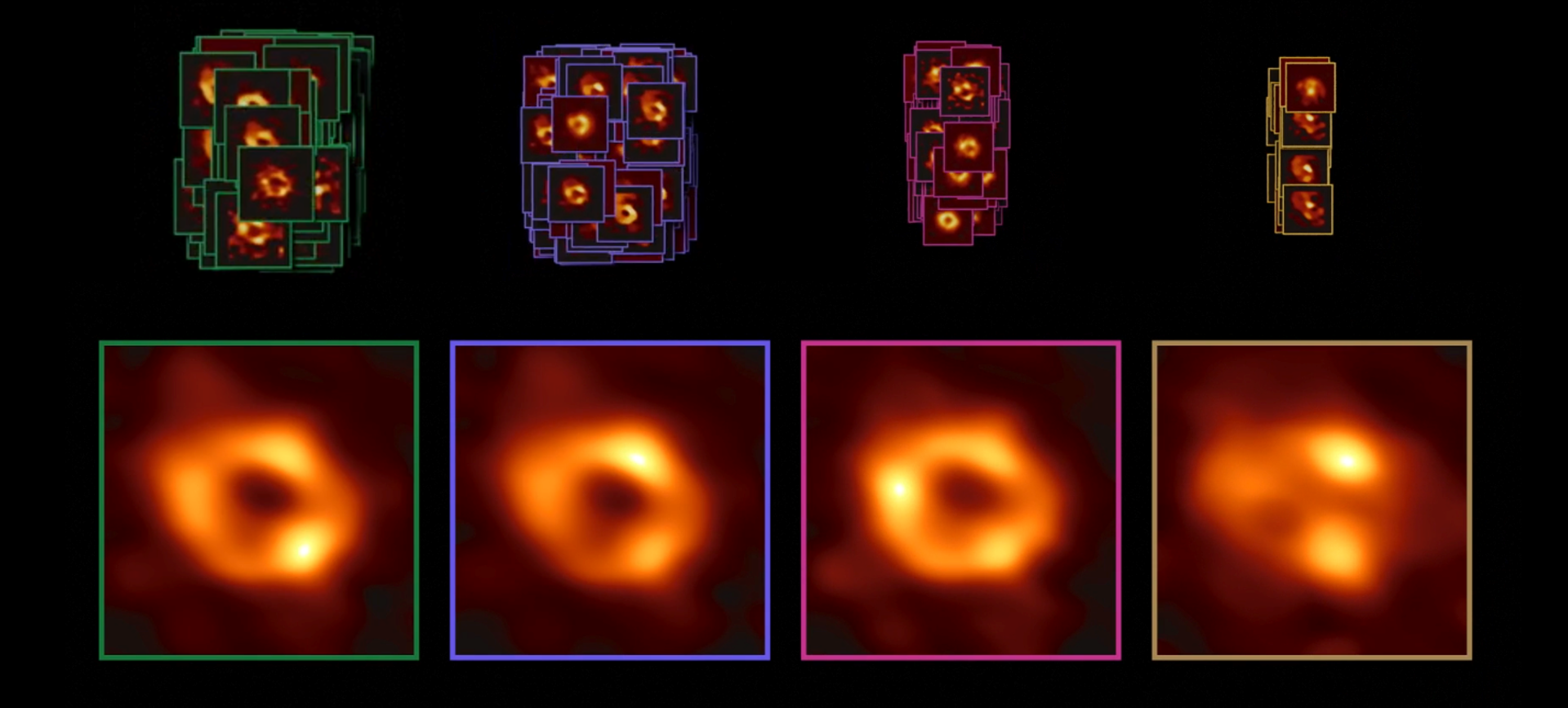
圖|事件視界望遠鏡合作團隊
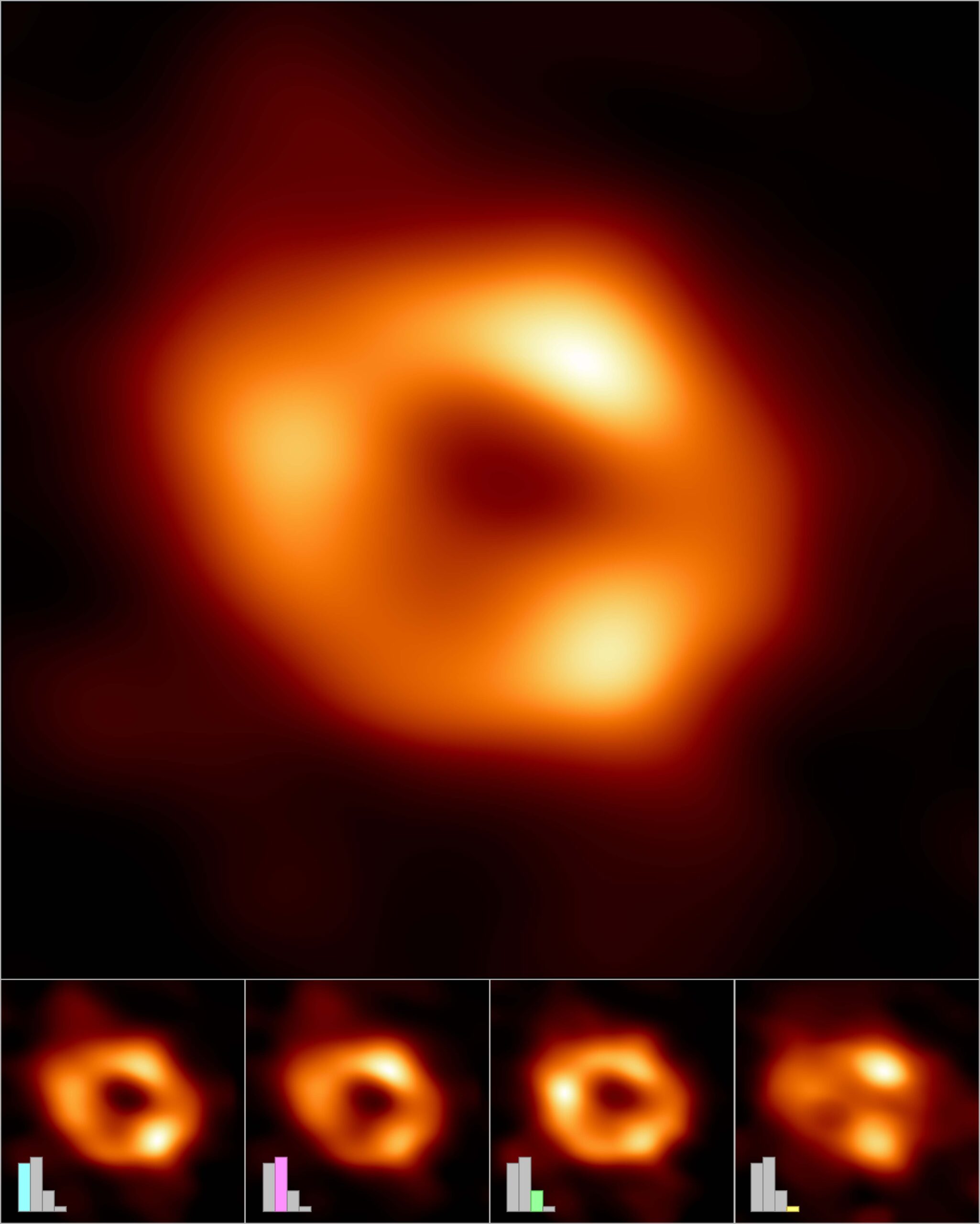
經由模擬找出的優良參數仍然不只一組,於是就有許多種和觀測數據吻合的影像。研究團隊並不是從中挑出唯一的影像,而是根據結構形狀把影像分為四種類型,並且取平均,得到最終公諸於世的那一張黑洞影像。
圖|EHT, Caltech/IPAC & MIT Haystack Observatory
圖|事件視界望遠鏡合作團隊
由於成像並非直觀的過程,所以科學家們各有不同的想法來成像。淺田圭一說,大家都知道成像很困難,雖然本質是國際合作,但是想法本身都是來自個人,所以這項任務也像是國際競爭,看誰能找出最好的解法。
2018 年取得數據之後,科學家嘗試很多方法來成像。大約在 2019 年底,就產生和最終結果多少相似的影像,但是研究團隊沒有十足把握,所以繼續微調、反覆確認,直到今(2022)年初,才終於得到有把握的黑洞影像。
對於事件視界望遠鏡的團隊而言,這幾年是個辛苦的歷程。他們每週都有橫跨亞洲、歐洲、美洲的線上國際會議,為了配合所有國家的時區,會議時間通常都在亞洲的晚上。淺田圭一說,對於年輕同事真是感到抱歉,他們週五晚上經常無法去放鬆 Happy,必須參與國際會議。
工欲善其事,必先利其器
黑洞照片的產出仰賴眾多科技。除了軟體技術之外,若沒有先進的硬體設備,如此精密的觀測無法完成。淺田圭一認為,中研院在黑洞觀測的硬體設備上有兩大貢獻:
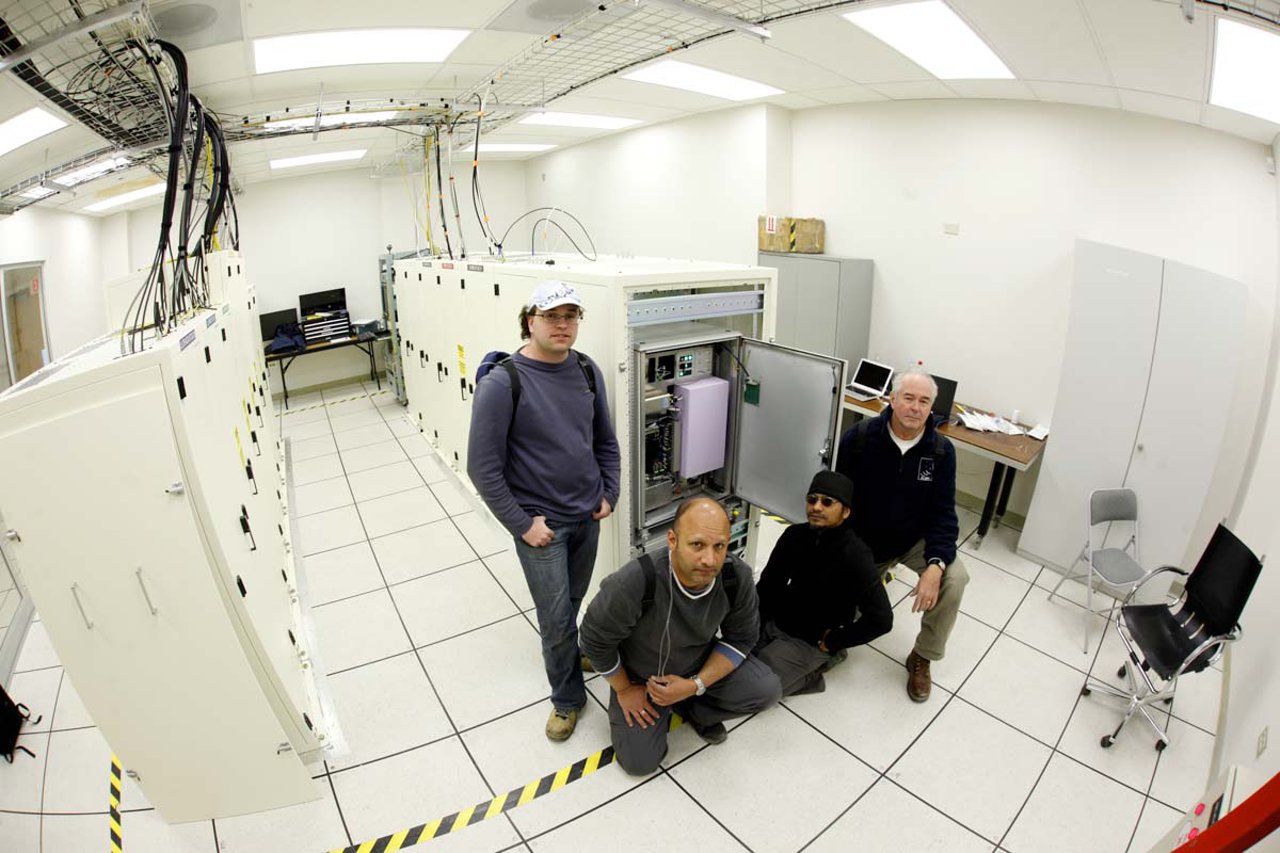
第一是數位轉換器(digitizer)。望遠鏡接收到的電磁波,需轉成數位訊號,才能進行下一步的數據處理。所有測站的數位轉換器都是由中研院完成,幕後功臣是天文所的江宏明研究技師。
第二是位於智利的阿塔卡瑪大型毫米及次毫米波陣列(ALMA)。事件視界望遠鏡大部分的靈敏度都來自 ALMA,遠遠超過其他望遠鏡。
ALMA 本身是個由數十座望遠鏡構成的干涉儀,但是黑洞觀測要把 ALMA 當作單一的一座望遠鏡,和其他測站共同組成更大的干涉儀。欲達成此目標,需要添加特殊功能,確保 ALMA 內部每一個望遠鏡所接收的電磁波對齊。這就是國際合作的 ALMA Phasing Project 的任務,早在事件視界望遠鏡合作團隊組成之前,中研院天文所就參與了這個計畫。
由於電波干涉儀的基本原理,是運用各個測站訊號抵達的時間差,來還原天體影像,因此需要非常精確地測定時間。事件視界望遠鏡的同步器(synchronizer)是運用氫邁射(hydrogen maser)的原子鐘,每秒鐘具有 10-13 的精確度,各個測站都需要裝設此配備。
原子鐘需要放置在很穩定的溫度和磁場下,以及無震動的環境中。氫邁射原子鐘的外面需要包裹三層的容器,確保設備高度穩定。事件視界望遠鏡的每個測站,都有專門放置原子鐘的位置。淺田圭一笑著說:電波望遠鏡放置原子鐘的房間裡有張椅子,那是他最喜歡的工作地點,因為最不容易受到干擾!
圖|ALMA (ESO/NAOJ/NRAO), C. Padilla
黑洞影像是眾多科學家協力完成的鉅作。精密硬體設備的每個部分,都是黑洞觀測不可或缺的利器。人馬座 A 星黑洞觀測完成之後,數據分析的工作也相當艱辛,耗費五年的時間才成功重建影像。一張「黑洞照」,絕不是曝光之後就會自動跑出來,而是集合眾人之力,以嚴密科學方法達到的成就。
—
註1:EHT 研究團隊使用兩套指令流程來校正數據:the CASA-based rPICARD pipeline、the HOPS-based EHT-HOPS pipeline